マニピュレータの使い方講習
本ページではマニピュレータの使い方講習で説明の補助となる内容をまとめています。
講習では以下のソフトウェアを使用します。
- Windows
- Google Chrome
- Tera Term
- macOS/Ubuntu
- Google Chrome
- Terminal
1. 本体の使い方
「危ない!」と思ったときにすぐに非常停止ができるよう、ティーチングボックスは常に手元に置いておきます。全員一回以上非常停止スイッチを押し、非常停止の仕方を確認しておきましょう。
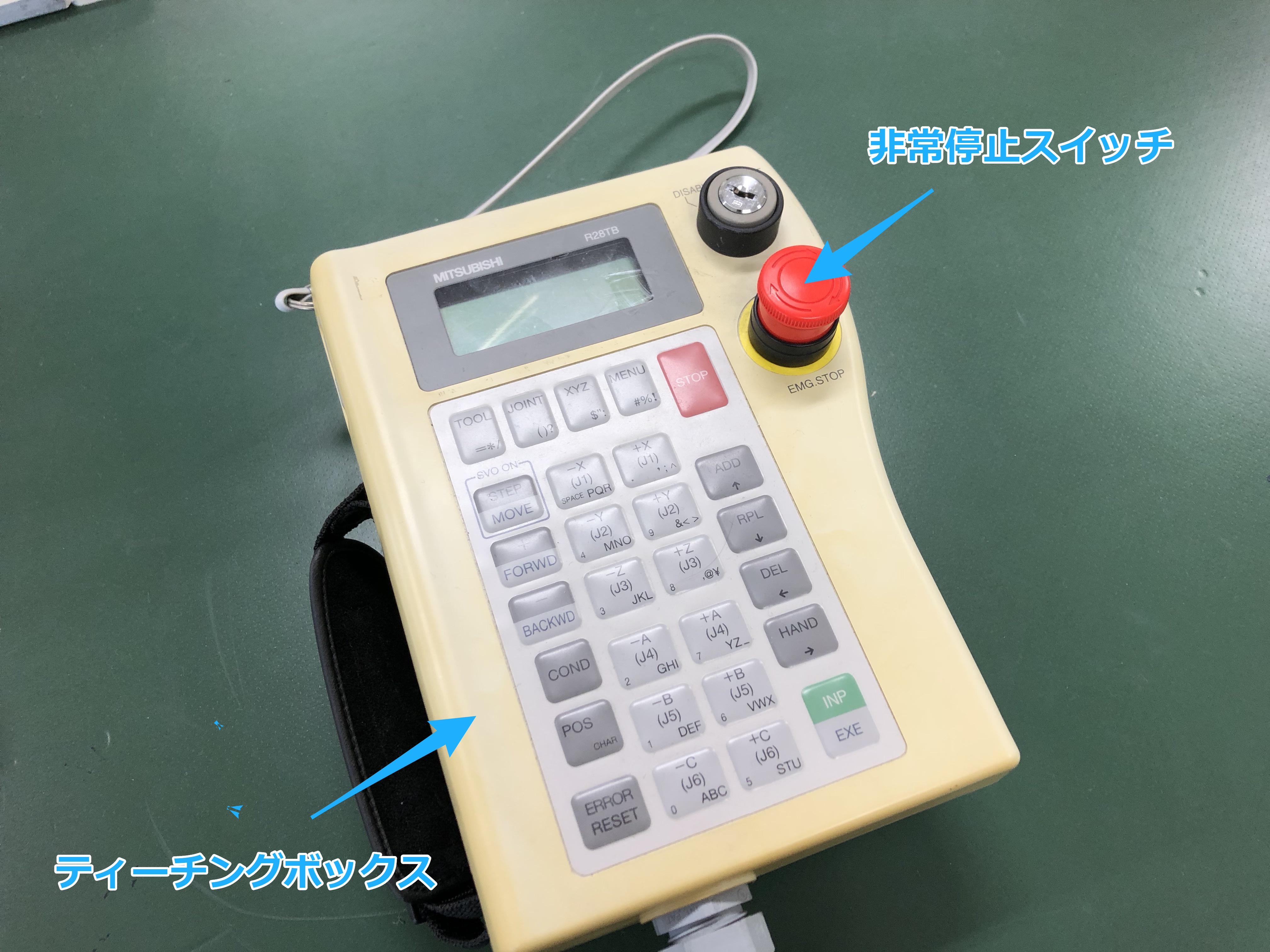
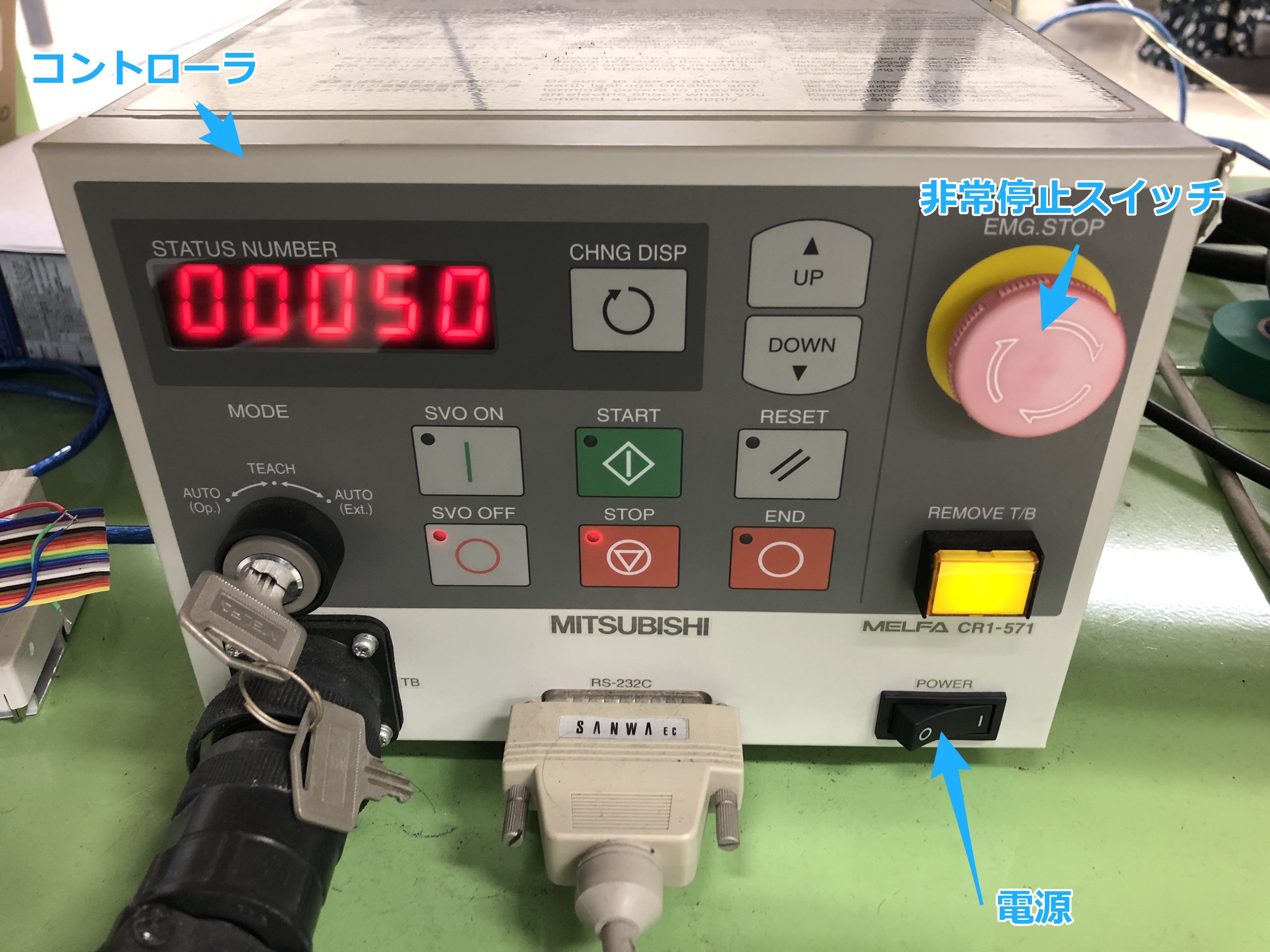
そのほかの各部名称については次の画像の通りです。
2. Webブラウザ経由の操作
SSID "adrobo-robothand_5G" に接続します。
セットアップまたはRaspberry Pi本体または基板に貼り付けられたIPアドレスが印字されたテープを参照し、操作する対象のRaspberry PiのIPアドレスを確認します。
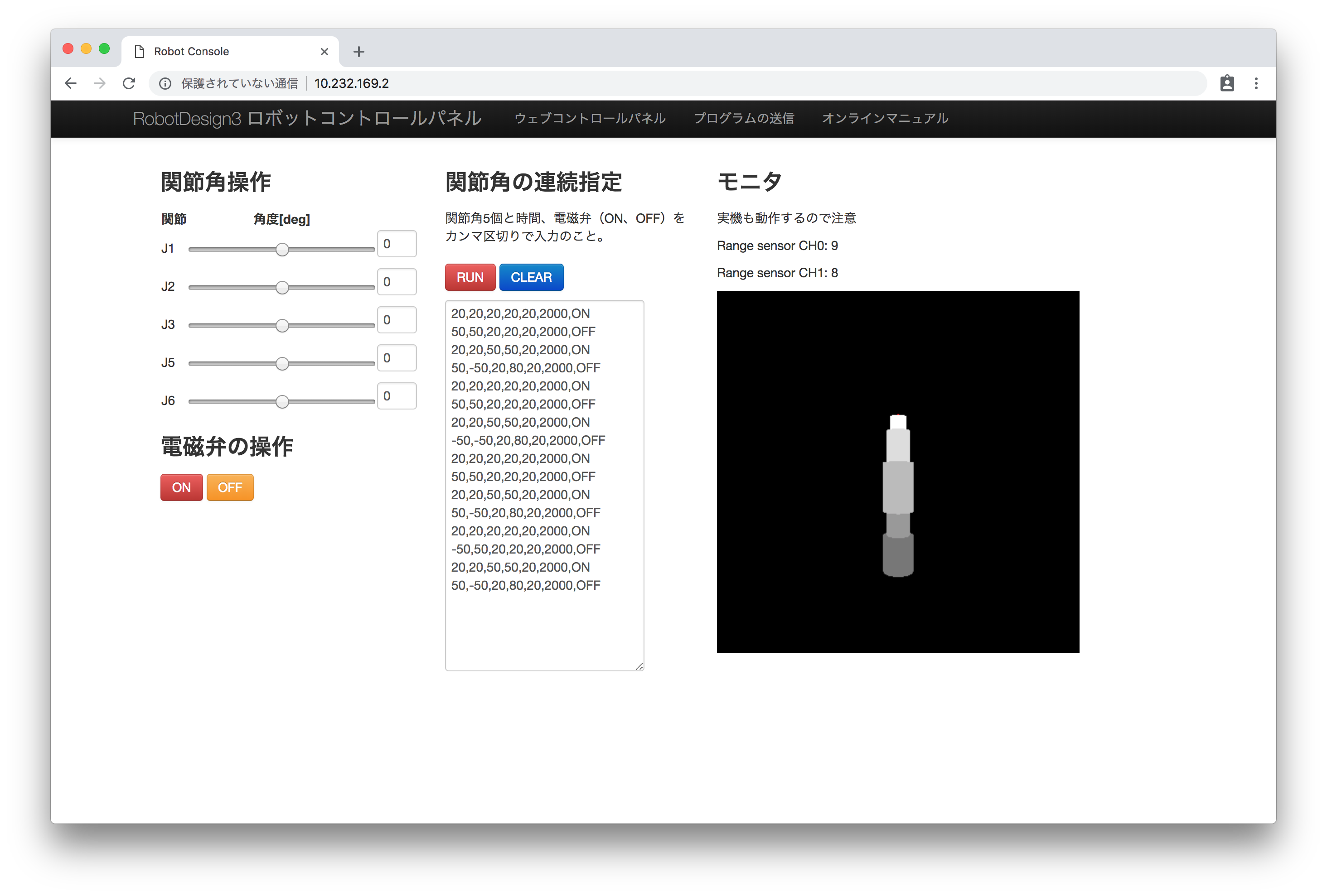
IPアドレスは10.232.169.22などのように数字とピリオドで構成される文字列です。Google Chromeを起動してURLとして入力します。
「関節角操作」、「電磁弁の操作」、「関節角の連続指定」ができること、関節角を変更すると「モニタ」上でロボットのモデルと実機の両方が動くことを確認しましょう。
さらにここでティーチングボックスの非常停止スイッチの使い方も確認しておきましょう。
実機なしでシミュレーションだけ利用する方法についてはこちらにまとめています。
3. SSH経由の操作
WebブラウザでRobot Consoleを開いたままSSH接続して操作します。
ログイン
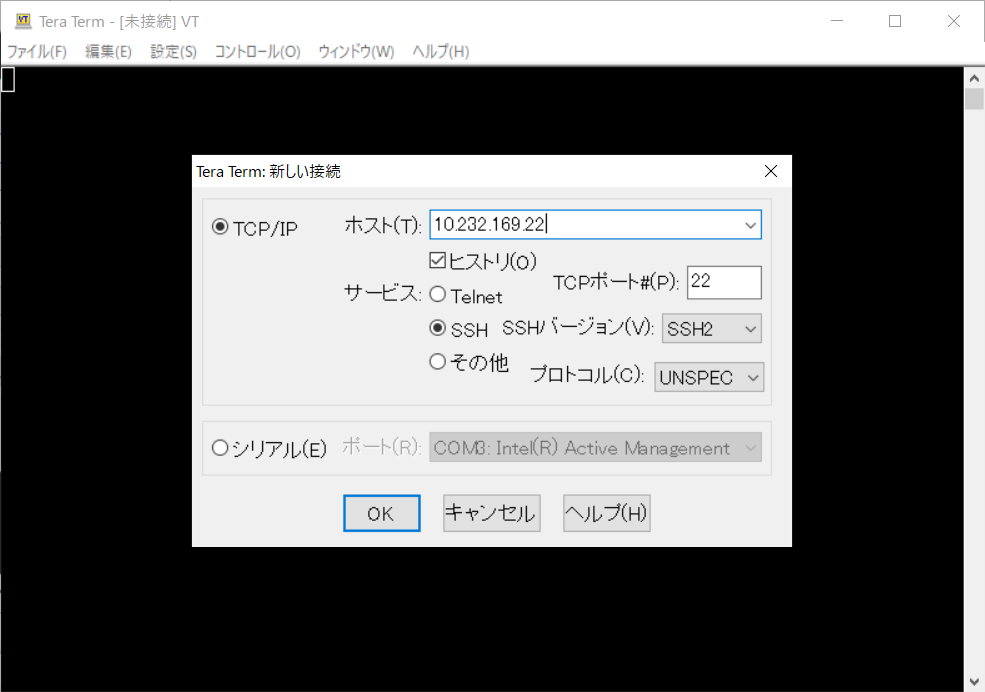
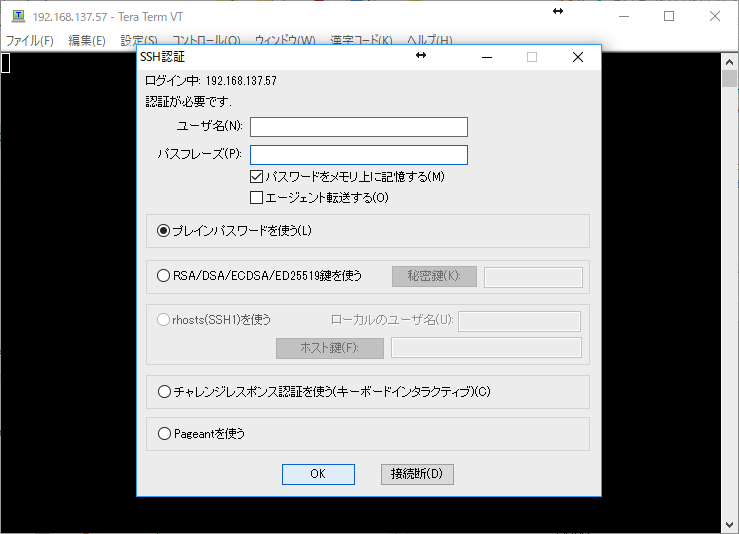
SSHでログインします。IPアドレスが10.232.169.22の場合は次の図のように「ホスト」の欄に10.232.169.22と入力します。
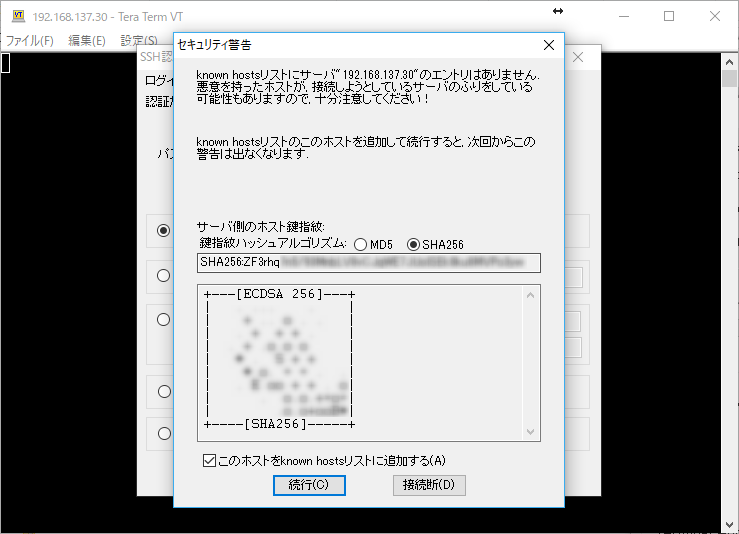
初回接続時は次のようにセキュリティ警告が出ます。「続行」を選択してください。
ユーザ名はubuntu、パスワードはraspberryでログインします。
確認
adconv_values, angles,
ev_on_offの3つのファイルが存在することを確認しましょう。$より後のコマンドを1行ずつTera Termに入力していきます。
Tera TermではAlt+Vまたはカーソル右クリックなどでクリップボードの内容をコンソールに貼り付けることができます。
ubuntu@ubuntu:~$ cd /run/shm
ubuntu@ubuntu:/run/shm$ ls
adconv_values angles ev_on_off
ロボットの電源が入っていない場合やRaspberry Piとロボットがうまく接続できていない場合、ファイルが存在しないことがあります。
アナログセンサ
デバイスファイルを操作してアナログセンサの値を何度か取得してみましょう。Webブラウザで開いているRobot Consoleで表示されている値と同じように変動することを確認しましょう。
コマンドを実行した瞬間のアナログセンサの状態を取得することができます。
ubuntu@ubuntu:/run/shm$ cat adconv_values
7 4
ubuntu@ubuntu:/run/shm$ cat adconv_values
125 42
バルブ開閉
デバイスファイルを操作してバルブの開閉をしてみましょう。エアシリンダが動きます。
ubuntu@ubuntu:/run/shm$ cat ev_on_off
0
ubuntu@ubuntu:/run/shm$ echo 1 > ev_on_off
ubuntu@ubuntu:/run/shm$ echo 0 > ev_on_off
マニピュレータの操作
デバイスファイルを操作してマニピュレータの角度の取得、設定をしてみましょう。角度を設定するとロボットが動き出すので注意しましょう。
角度は半角数字でカンマ区切りで指定します。
ubuntu@ubuntu:/run/shm$ cat angles
0,0,0,0,23
ubuntu@ubuntu:/run/shm$ echo "0,0,0,0,0" > angles
ubuntu@ubuntu:/run/shm$ echo "30,0,0,0,0" > angles
ロボット側の電源が立ち上がっていないと、/tmp/log中に以下のようなワーニングが出ます。 この場合はロボットの電源を入れてRaspberry Piを再起動し、再度/tmp/logを確認しましょう。
chmod: cannot access `/dev/ttyUSB0': No such file or directory
4. C言語で書かれたサンプルの実行
C言語で書かれたサンプルを実行してみましょう。コンパイルしたa.outを実行するとロボットが動き出すので注意しましょう。
CtrlキーとCキーを同時押しすることでプログラムを途中で止めることができます。
ubuntu@ubuntu:/run/shm$ cd ~/RobotDesign3/code_sample/c_cpp/
ubuntu@ubuntu:~/RobotDesign3/code_sample/c_cpp$ gcc manip.cc -o a.out
ubuntu@ubuntu:~/RobotDesign3/code_sample/c_cpp$ ./a.out