Paspberry Piコントローラ操作マニュアル(学生用)
Raspberry Piコントローラの操作マニュアルです。
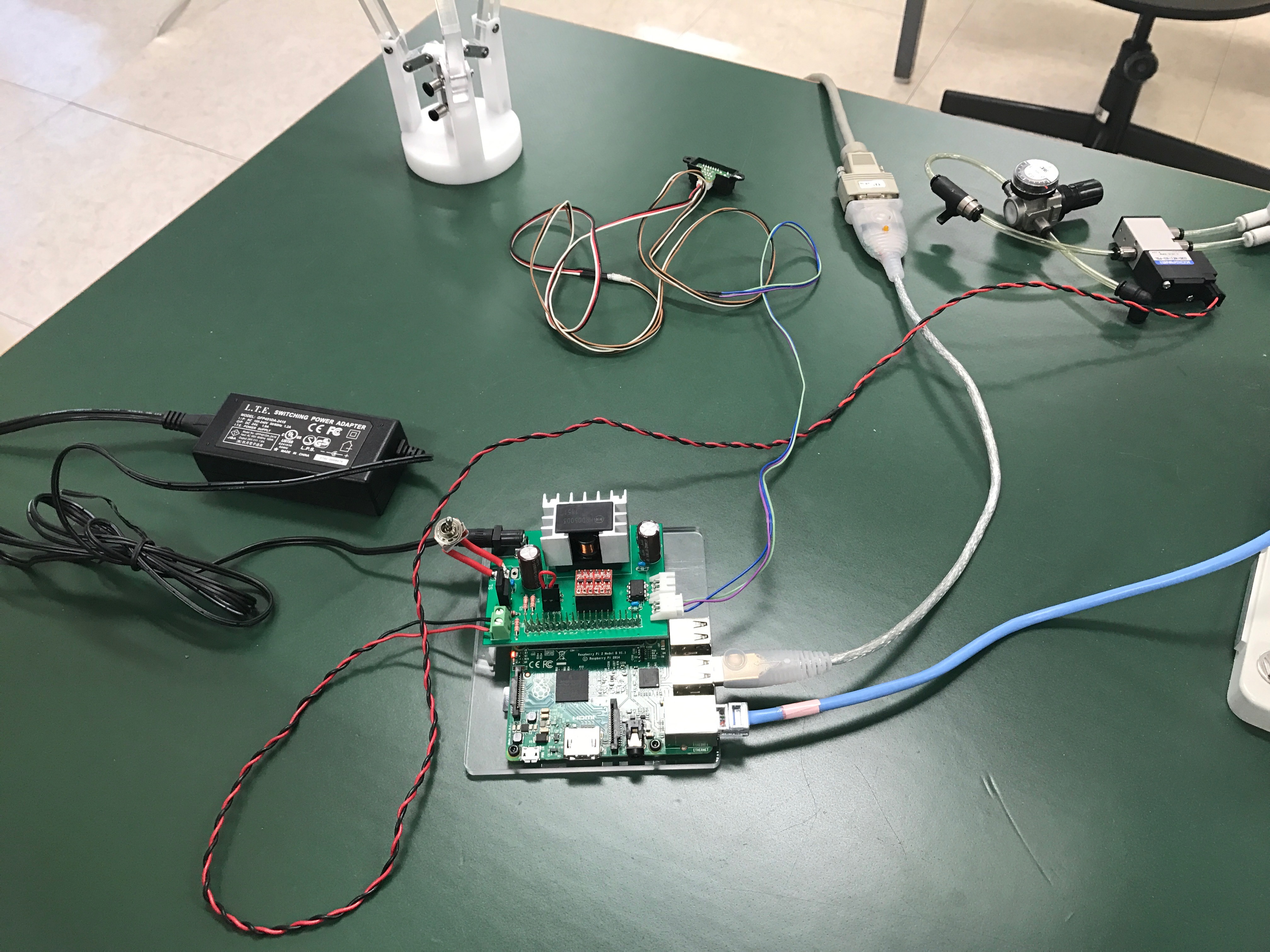
配線
スイッチがOFFになっていることを確認し、以下を接続します。
- ACアダプタ
- USB-シリアル変換ケーブル
- LANケーブル
- 電磁弁のケーブル(利用する場合)
- 距離センサのケーブル(利用する場合)
ブラウザからコントローラへのアクセス
電源スイッチをONしてRaspberry Piの赤・緑のLEDの様子を見て動作していることを確認します。
コントローラにIPアドレスが明記してあるので、自分のノートPCのブラウザから
http://<IPアドレス>で接続します。次のように画面が開き、距離センサ(ADコンバータ)の値がリアルタイムで確認できたら、ラズパイ側のプログラムが無事に走っています。
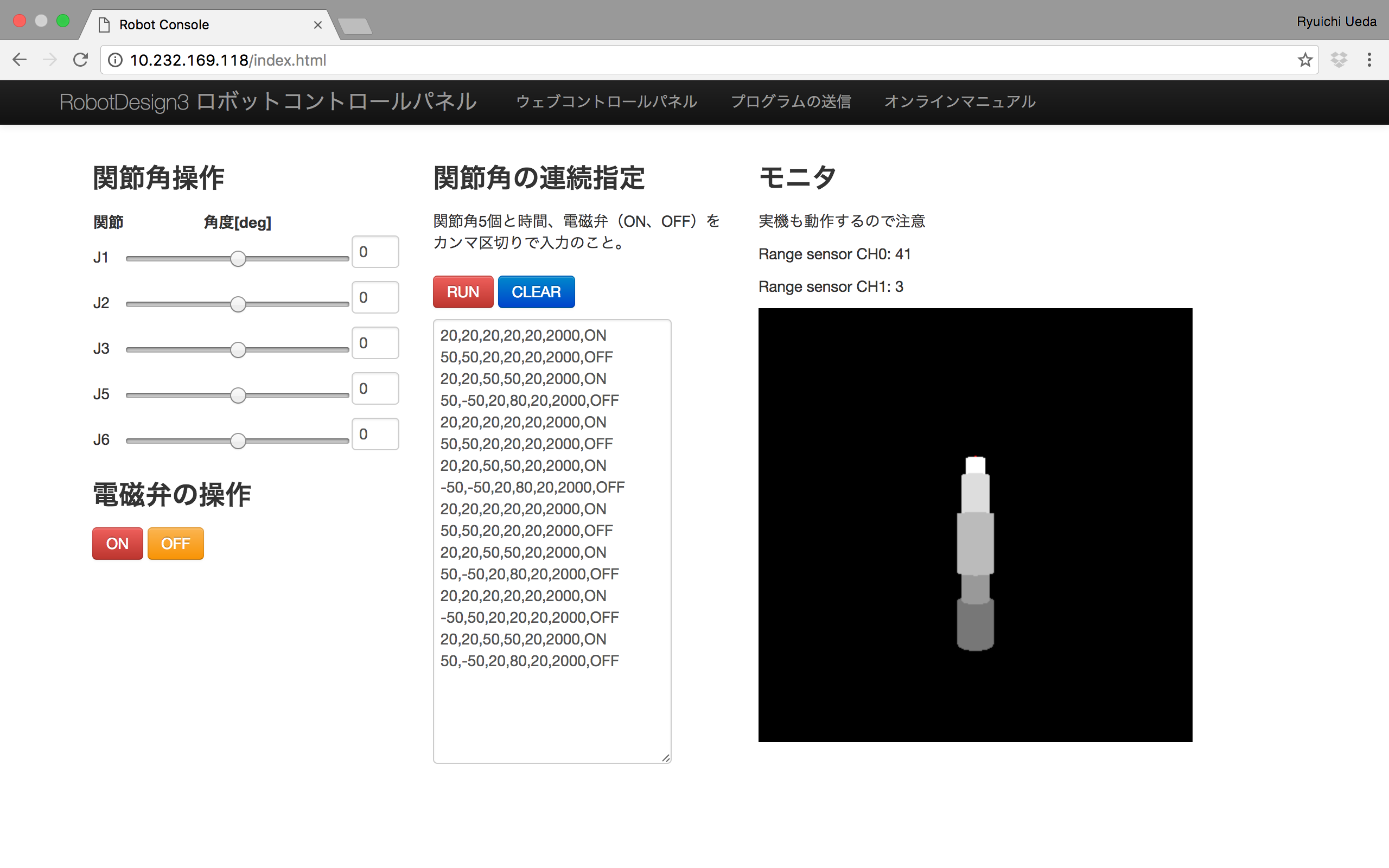
ロボットコントロールパネルの操作
ブラウザで表示される「ロボットコントロールパネル」には、次のようなツールが備わっています。
| ツール | 機能 |
|---|---|
| 関節角操作 | スライドバーや角度入力のためのテキストボックスで各関節の角度を指定すると、その通りにマニピュレータとモニタのシミュレションが動きます。 |
| 電磁弁の操作 | 電磁弁のオンオフができます。 |
| 関節角の連続指定 | 手書き、あるいはプログラムで生成したカンマ区切りのデータを貼り付けてRUNボタンを押すと、マニピュレータと電磁弁がその通りに動作します。 |
| モニタ | 距離センサ(ADコンバータ)の値の表示とロボットの姿勢のシミュレーションです。シミュレーション画面はロボットが手元にない時の動作確認用にも使えます。利用方法はこちら。 |
オフラインでのロボットコントロールパネルの利用
モニタのシミュレータは、OSの種類を問わず主要なブラウザがあれば、実機のロボットがなくても動作します。 WEBブラウザでhttps://cit-ar-lab.github.io/RobotDesign3-demo/を開くと利用できます。